- Membuat Armatur Utama, root body
- Membuat Armatur Badan, Spine 1(Perut), Spine 2(Pinggang), Spine 3(Dada), Spine 4(Leher) dan Spine 5(Kepala)
- Membuat Armatur Utama, root body
- Membuat Armatur Badan, Spine 1(Perut), Spine 2(Pinggang), Spine 3(Dada), Spine 4(Leher) dan Spine 5(Kepala)
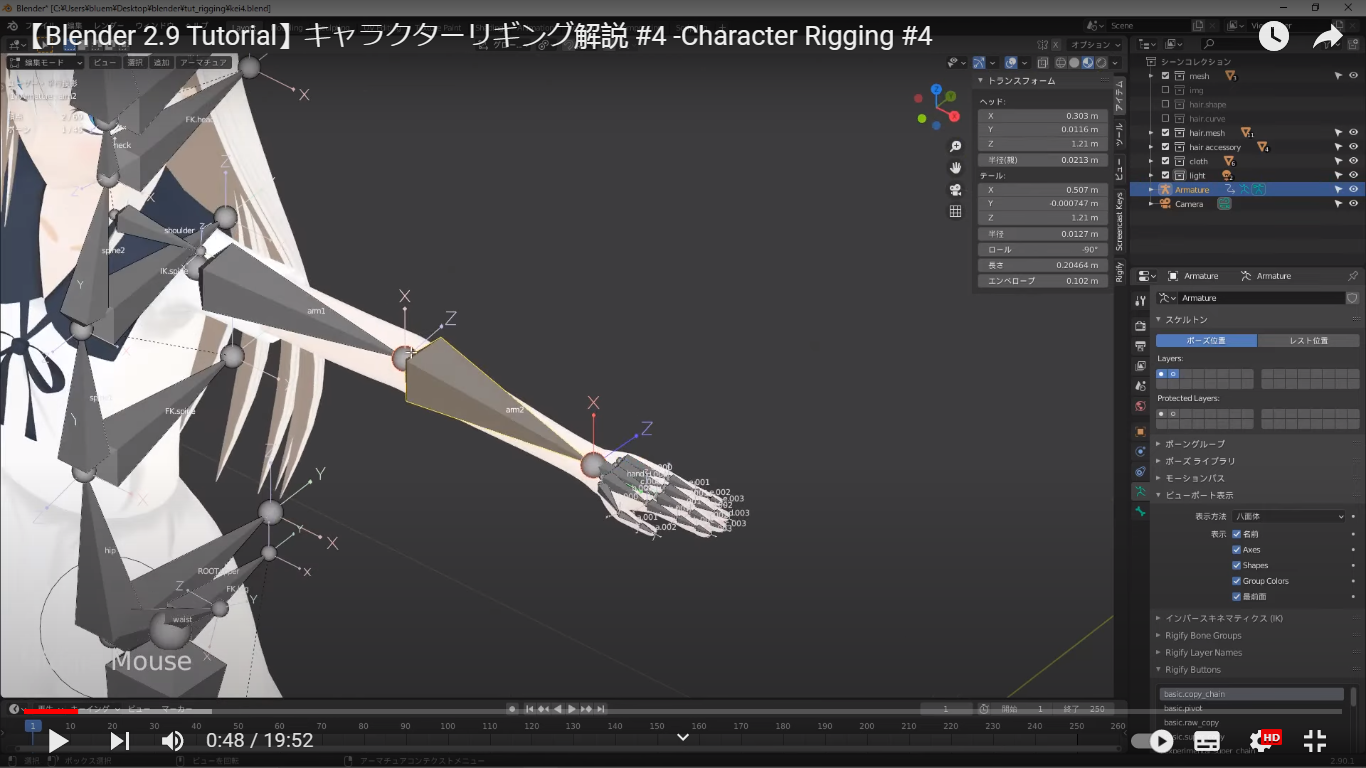
- Membuat Armatur Lengan(Bahu, Lengan Atas, Lengan Bawah, dan Tangan) dan Jari – Jari Tangan
- Membuat Armatur Kaki(Pinggang, Tungkai Atas/Paha, Tungkai Bawah, Kaki dan Jari Kaki)
- Menentukan Arah Poros(Role), Untuk Tangan X mengarah ke atas, sedangkan untuk jari Z mengarah ke atas.
- Membuat IK dan Pole IK, (IK_Tangan.L, Pole_Siku.L). Pada Lengan Bawah di buat bone constrain IK, Target: Nama Rig, Bone :IK Tangan, Pole Target: Nama Rig, Bone : Pole Siku.L , Pole Angle :90 Literation 500, Chain Length 2. Untuk Tangan Kanan Pole Angle :-90. Pada Betis Kiri dibuat bone constrain IK, Target: Nama Rig, Bone :IK Kaki.L , Pole Target: Nama Rig, Bone : Pole Lutut.L , Pole Angle :-90 Literation 500, Chain Length 2. Untuk Kaki Kanan Pole Angle :90.
- Memutuskan deformasi kontroler rig dengan menghilangkan ceklis deform pada tab bone properties>Deform.
- Menentukan Parent dan Child Kontroller Rig.
- Membuat Konstrain Copy Rotation. Pada Tangan.L dibuat copy rotation: Target : Nama Rig, Bone : IK Tangan.L. Pada Tangan.R dibuat copy rotation: Target : Nama Rig, Bone : IK Tangan.R. Pada Tapak Kaki.L dibuat copy rotation: Target : Nama Rig, Bone : IK Kaki.L. Pada Tapak Kaki.R dibuat copy rotation: Target : Nama Rig, Bone : IK Kaki.R
| No. | Parent | Child |
| 1 | Root_Body | Spine 1(Perut) |
| 2 | Root_Body | Root Kaki L |
| 3 | Root_Body | Root Kaki R |
| 4 | Root Kaki L | Jemari Kaki L |
| 5 | Root Kaki R | Jemari Kaki L |
| 6 | Jemari Kaki L | Pivot L |
| 7 | Jemari Kaki R | Pivot R |
